Silniki krokowe

Silnik krokowy – silnik elektryczny, w którym impulsowe zasilanie prądem elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje za każdym razem ruch obrotowy o ściśle ustalonym kącie.
Dzięki temu kąt obrotu wirnika jest ściśle zależny od liczby dostarczonych impulsów prądowych, a prędkość kątowa wirnika jest dokładnie równa częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika w jednym cyklu pracy silnika.
Kąt obrotu wirnika pod wpływem działania jednego impulsu może mieć różną wartość, zależnie od budowy silnika – jest to zwykle wartość od kilku do kilkudziesięciu stopni. Silniki krokowe, zależnie od przeznaczenia są przystosowane do wykonywania od ułamków obrotu na minutę do kilkuset obrotów na minutę.
Silniki krokowe 2-fazowe 1,8°
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 39mm
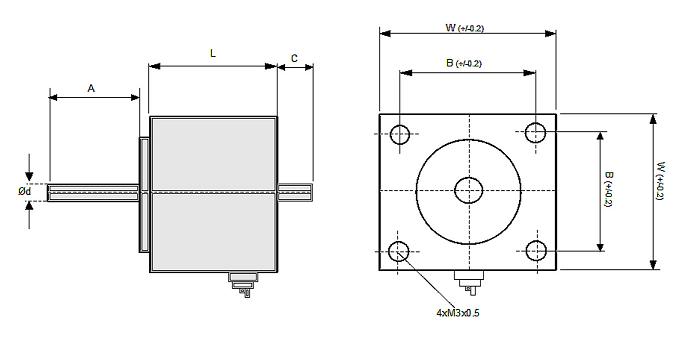
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 39BYGH 001 | Unipol | 1,8 | 5 | 1 | 5 | 4 | 0,18 | 13 | 0,15 | 21 | 5 | - |
34 | 39 | 31 |
| 39BYGH 402UD | Unipol | 1,8 | 12 | 0,3 | 40 | 45 | 0,11 | 20 | 0,24 | 14 | 5 | 9 | 34 | 39 | 31 |
| 39BYGH 402UD | Unipol | 1,8 | 12 | 0,4 | 30 | 32 | 0,11 | 25 | 0,2 | 14 | 5 | 9 | 34 | 39 | 31 |
| 39BYGH 402B | Bipol | 1,8 | 12 | 0,3 | 40 | 20 | 0,11 | 20 | 0,24 | 22 | 5 | - |
34 | 39 | 31 |
| 39BYGH 405B | Bipol | 1,8 | 12 | 0,4 | 30 | 32 | 0,21 | 20 | 0,24 | 18 | 5 | - |
34 | 39 | 31 |
| 39BYGH 603 | Unipol | 1,8 | 12 | 0,16 | 75 | 50 | 0,11 | 20 | 0,24 | 18 | 5 | - |
34 | 39 | 31 |
| 39BYGH 702U | Unipol | 1,8 | 12 | 0,4 | 30 | 32 | 0,21 | 20 | 0,25 | 22 | 5 | - |
45 | 39 | 31 |
| 39BYGH 002 | Unipol | 1,8 | 6,5 | 0,5 | 13 | 7,5 | 0,08 | 13 | 0,15 | 21,5 | 5 | - |
20 | 39 | 31 |
Zalecane sterowniki: SMC 50, SMC 52, SMC 81.
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 42mm
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 42BYGH 101B | Bipol | 1,8 | 2,5 | 1,7 | 1,5 | 3,2 | 0,3 | 32 | 0,24 | 22 | 5 | - |
39 | 42 | 32 |
| 42BYGH 102U | Unipol | 1,8 | 3,6 | 1,2 | 3 | 3,2 | 0,3 | 32 | 0,24 | 22 | 5 | - |
39 | 42 | 32 |
| 42BYGH 802B | Bipol | 1,8 | 12 | 0,4 | 30 | 22 | 0,38 | 68 | 0,31 | 18 | 5 | - |
47 | 42 | 32 |
| 42BYGH 802U | Unipol | 1,8 | 12 | 0,8 | 15 | 12 | 0,35 | 68 | 0,31 | 18 | 5 | - |
47 | 42 | 32 |
| 42BYGH 118-01B | Bipol | 1,8 | 12 | 0,5 | 24 | 36 | 0,42 | 75 | 0,34 | 18 | 5 | - |
48 | 42 | 32 |
| 42BYGH 404U | Unipol | 1,8 | 12 | 0,4 | 30 | 22 | 0,32 | 68 | 0,34 | 22 | 5 | - |
47 | 42 | 32 |
| 42BYGH 822BD | Bipol | 1,8 | 4,6 | 1 | 4,6 | 4 | 0,35 | 68 | 0,34 | 23 | 6 | 25 | 48 | 42 | 32 |
| 42BYGH 012E | Bipol | 1,8 | 5,6 | 0,6 | 9,3 | 27 | 0,24 | 24 | 0,2 | 23 | 5 | - |
33 | 42 | 32 |
Zalecane sterowniki: SMC 51, SMC 62, SMC 81.
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 57mm
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 57BYG 081 | Bipol | 1,8 | 5 | 1 | 5 | 8,6 | 0,55 | 110 | 0,6 | 21 | 6,35 | - |
51 | 57 | 47,14 |
| 57BYG 081D | Bipol | 1,8 | 5 | 1 | 5 | 8,6 | 0,55 | 115 | 0,6 | 21 | 6,35 | - |
51 | 57 | 47,14 |
| 57BYG 412 | Bipol | 1,8 | 2,8 | 1,6 | 1,8 | 3,2 | 0,4 | 60 | 0,38 | 21 | 6,35 | - |
41 | 57 | 47,14 |
| 57BYG 707 | Bipol | 1,8 | 4,1 | 2,3 | 1,7 | 6,5 | 1,4 | 220 | 1 | 20 | 6,35 | - |
76 | 57 | 47,14 |
Zalecane sterowniki: SMC 62, SMC 64, SMC 81, SMC 108, SIC 184, SQCA 244.
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 57BYGH 801 | Unipol | 1,8 | 3,3 | 1,5 | 2,2 | 3,5 | 0,55 | 150 | 0,73 | 21 | 6,35 | - |
50 | 57 | 47,14 |
| 57BYGH 802 | Unipol | 1,8 | 4,8 | 1,5 | 3,2 | 6,7 | 0,8 | 280 | 0,81 | 20,6 | 6,35 | - |
55 | 57 | 47,14 |
| 57BYGH 803 | Unipol | 1,8 | 6,3 | 1,5 | 4,2 | 9,6 | 1,4 | 440 | 1,1 | 20,6 | 6,35 | - |
77 | 57 | 47,14 |
| 57BYGH 804 | Bipol | 1,8 | 3,3 | 3 | 1,1 | 1,4 | 1,2 | 440 | 1,1 | 21,6 | 8 | - |
77,5 | 57 | 47,14 |
| 57BYGH 805 | Bipol | 1,8 | 4,2 | 4,2 | 1 | 2,67 | 1,6 | 650 | 1,8 | 20,6 | 10 | - |
112 | 57 | 47,14 |
| 57BYGH 806 | Unipol | 1,8 | 2,7 | 3 | 0,9 | 1,2 | 0,8 | 280 | 0,81 | 20,6 | 6,35 | - |
55 | 57 | 47,14 |
| 57BYGH 807 | Unipol | 1,8 | 2,5 | 3 | 0,85 | 1,3 | 1,4 | 440 | 1,1 | 20,6 | 6,35 | - |
77,5 | 57 | 47,14 |
| 57BYGH 861 | Unipol | 1,8 | 12 | 0,6 | 20 | 57 | 0,9 | 440 | 0,8 | 20,6 | 6,35 | - |
55 | 57 | 47,14 |
| 57BYGH 881 | Bipol | 1,8 | 6,5 | 0,65 | 10 | 60 | 0,5 | 150 | 0,55 | 20,6 | 6,35 | - |
41,5 | 57 | 47,14 |
Zalecane sterowniki: SMC 62, SMC 64, SMC 116, SMC 108, SIC 184, SQCA 244.
Dla uzyskania dużej dynamiki: SMC 139.
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 60mm
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 60BYGH 601 | 6 unipol | 1,8 | 5,6 | 3 | 0,8 | 1 | 0,75 | 300 | 0,8 | 21 | 8 | - |
87 | 60 | 50 |
| 60BYGH 603 | 4 bipol | 1,8 | 5 | 2,5 | 2 | 9,5 | 1,9 | 570 | 1,34 | 21 | 8 | - |
87 | 60 | 50 |
| 60BYGH 604 | 8 bipol | 1,8 | 1,4 | 4 | 0,35 | 1 | 0,86 | 570 | 1,34 | 21 | 8 | - |
87 | 60 | 50 |
Zalecane sterowniki: SMC 62, SMC 64, SMC 116, SMC 108, SIC 184, SQCA 244.
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 85mm
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 85BYGH 450-08 | 4 bipol | 1,8 | 3,6 | 3,5 | 1 | 6 | 2,2 | 200 | 1,7 | 37 | 14 | - |
80 | 85 | 69,7 |
| 85BYGH 450A | 6 unipol | 1,8 | 2,8 | 4,5 | 0,64 | 5,3 | 4,1 | 350 | 2,8 | 37 | 14 | - |
113 | 85 | 69,7 |
| 85BYGH 450B | 8 bipol | 1,8 | 3,8 | 4 | 0,95 | 8,8 | 6,3 | 580 | 3,8 | 37 | 14 | - |
153 | 85 | 69,7 |
| 85BYGH 450C | 4 bipol | 1,8 | 2,8 | 8,5 | 0,33 | 1,5 | 6 | 350 | 2,8 | 37 | 14 | - |
115 | 85 | 69,7 |
| 85BYGH 450E | 4 bipol | 1,8 | 2,8 | 8,5 | 0,33 | 1,5 | 6 | 350 | 2,8 | 37 | 14 | - |
115 | 85 | 69,7 |
Zalecane sterowniki: SIC 184, SMC 116, SMC 139.
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 86mm
|
Symbol modelu |
Typ silnika |
Krok (o) |
Napięcie (V) |
Prąd (A) |
Rezystancja (Ω) |
Indukcyjność (mH) |
Moment (Nm) |
Bezwładność rotora (gcm2) |
Waga (kg) |
Wymiary [mm] |
|||||
|
A |
Ø d |
C |
L |
W |
B |
||||||||||
|
86BYGH 450A-04 |
Bipol |
1,8 |
1,4 |
4,5 |
0,31 |
1,3 |
1,18 |
560 |
1,6 |
30 |
9,52 |
62 |
82,5 |
69,6 |
|
|
86BYGH 450B-01 |
Bipol |
1,8 |
3 |
4 |
0,75 |
3,5 |
2,16 |
1100 |
2,6 |
30 |
9,52 |
94 |
82,5 |
69,6 |
|
|
86BYGH 450C-01 |
Bipol |
1,8 |
2 |
7 |
0,29 |
2 |
2,94 |
1800 |
4 |
30 |
9,52 |
134 |
82,5 |
69,6 |
|
Zalecane sterowniki: SMC 116, SMC 127, SMC 139
SILNIKI KROKOWE DWUFAZOWE - Rozmiar 110mm
| Symbol modelu | Typ silnika | Krok (o) | Napięcie (V) | Prąd (A) | Rezystancja (Ω) | Indukcyjność (mH) | Moment (Nm) | Bezwładność rotora (gcm2) | Waga (kg) | Wymiary [mm] | |||||
| A | Ø d | C | L | W | B | ||||||||||
| 110BYGH 201 | Bipol | 1,8 | 3,2 | 5,5 | 0,58 | 10,1 | 11,5 | 5500 | 5 | 57 | 19 | - |
100 | 110 | 89 |
| 110BYGH 401 | Bipol | 1,8 | 4 | 6,5 | 0,6 | 12,8 | 22 | 10900 | 8,5 | 57 | 19 | - |
150 | 110 | 89 |
| 110BYGH 601 | Bipol | 1,8 | 4 | 8 | 0,5 | 11 | 30 | 16200 | 11,7 | 57 | 19 | - |
210 | 110 | 89 |
Zalecane sterowniki: SMC 139.
Zalety i wady silników krokowych
Zalety:
Kąt obrotu silnika jest proporcjonalny do liczby impulsów wejściowych.
Silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane).
Precyzyjne pozycjonowanie i powtarzalność ruchu - dobre silniki krokowe mają dokładność ok. 3 - 5% kroku i błąd ten nie kumuluje się z kroku na krok.
Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku.
Niezawodne - ze względu na brak szczotek. żywotność silnika zależy zatem tylko od żywotności łożysk.
Zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu.
Możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem umocowanym bezpośrednio na wale silnika.
Szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest proporcjonalna do częstotliwości impulsów wejściowych.
Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego sterowania w pętli otwartej. Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia zwrotnego - informacji o położeniu. Takie sterowanie eliminuje potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego, takich jak enkodery optoelektroniczne. Pozycje znajduje się zliczając impulsy wejściowe. Ponieważ (patrz: wady) w silniku krokowym może jednak wystąpić zjawisko gubienia kroków, np. przy niewłaściwym sterowaniu lub nadmiernym obciążeniu silnika, nie można tej zalety traktować jako gwarantowanej dla każdego silnika krokowego i dowolnych warunków jego pracy.
Wady:
Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
Trudności przy pracy z bardzo dużymi prędkościami.
W praktyce małe maksymalne obroty: rzędu kilku-kilkuset obrotów na minutę.
Występuje zjawisko gubienia kroków
Duży pobór prądu
Duża emisja ciepła